3핵심과제에서 개발하고 있는 SCV(Seabed Construction Vehicle)는 중작업을 위해 궤도차량의 형태를 가지고 있는데, 여기에서는 기동성능의 확보가 어려운 지반에서 활용하고 있는 궤도시스템에 대해 현재 기술수준과 기존 ROV에서 활용하고 있는 트랙시스템 및 차량의 기동이 매우 어려운 초연약지반에서 활용할 수 있는 궤도시스템에 대해 소개하고자 한다.

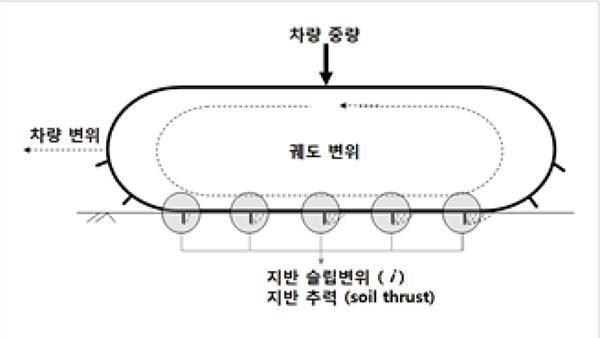
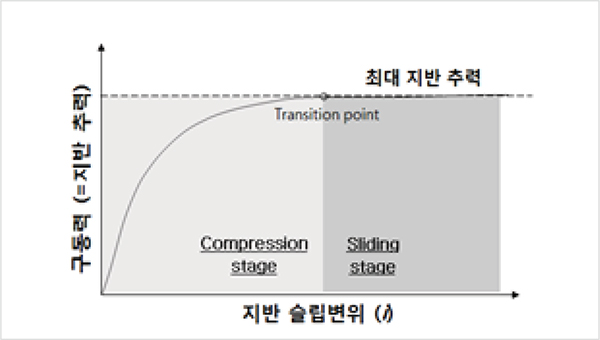
차량의 엔진에서 발생하는 추진력에 따라 구동성능이 결정되는 도로 주행차량과 달리, 사막이나 빙설지역, 늪지와 같은 연약한 지반에서 운용되는 궤도차량의 구동성능은 궤도와 지반의 상호작용에 의해 결정되는데, 차량이 주행하는 지반의 특성과 궤도의 형상에 따라 구동성능이 결정된다. 차량의 엔진에서 발생하는 추진력은 궤도의 회전변위를 발생시키고 차량변위와 궤도-지반의 접지면에 전단하중을 가하여 지반의 슬립변위( )를 발생시킴. 또한 지반에서 발생된 슬립변위는 지반의 전단응력을 발현시키며 궤도-지반의 접지면을 따라 발현된 지반의 전단력, 즉 지반추력(soil thrust)은 궤도차량을 구동시키는 구동력으로 작용하게 된다.
)를 발생시킴. 또한 지반에서 발생된 슬립변위는 지반의 전단응력을 발현시키며 궤도-지반의 접지면을 따라 발현된 지반의 전단력, 즉 지반추력(soil thrust)은 궤도차량을 구동시키는 구동력으로 작용하게 된다.
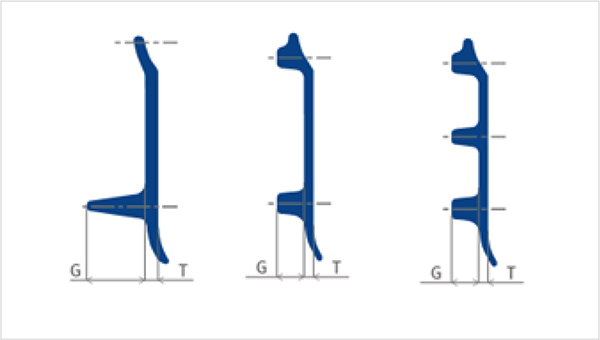
궤도차량의 궤도에는 추진력을 증가시키기 위한 돌기 형태의 그라우져(grouser)를 형성하는데, 주행하고자 하는 지반의 특성에 따라 single, double, triple grouser를 활용하고 있으며, 용도와 추력의 확보에 유리한 새로운 형태의 그라우져에 대한 연구가 진행 중이다.

기존에 국내외에서 활용하고 트랙식 ROV에서 채용하고 있는 궤도시스템은 용도에 따라 다양한데, 대부분 연약지반에서 기동성능 확보를 위하여 고무재질의 트랙과 큰 사각형태의 단일 그라우져를 활용하고 있다. 다음 그림에서 대표적인 ROV의 궤도형태와 제시하고 있는 구동가능 지반의 강도를 정리하였다.


고기능을 가진 트랙시스템을 장착하더라도 최소한의 표층 강도를 가지지 않은 초연약지반에서는 장비의 기동은 불가능하다. 따라서 이러한 지반에서 기동성능을 향상기키기 위한 다양한 시도들이 있었으며, 현재 두가지 정도의 부가장치를 이용하여 초연약지반에서 기동이 가능한 궤도시스템의 구현이 가능하다.
첫 번째는 어느 정도 강도를 가진 초연약지반 또는 설상지역에서는 장비의 기동은 궤도의 추력이 부족한 것이 아니라 장비의 자중에 의한 침하로 인해 기동이 불가능한 경우가 많기 때문에 이를 극복하기 위해 장비의 접지력을 줄이고 전방의 침하를 억제하는 스키드를 장착하여 기동성능을 확보하는 시스템이다.
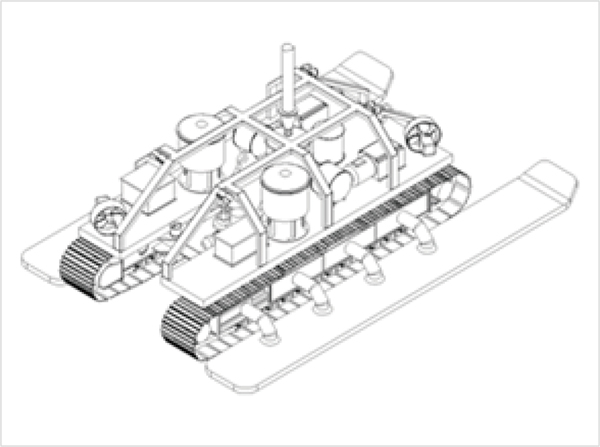
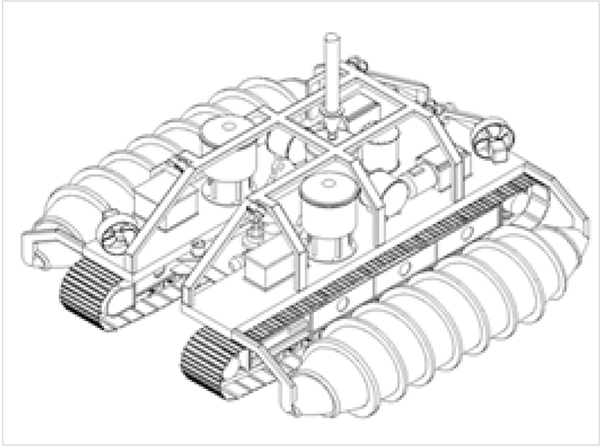
두 번째는 지반이 너무 연약하여 궤도의 추력으로는 기동이 불가능한 경우에 거의 유일하게 활용할 수 있는 스크류 추진기를 장착한 차량으로 기존 트랙시스템과 결합하여 활용할 수 있다.