


수중 로봇의 위치 및 자세 추정은 수중 로봇 제어 및 운영을 위한 핵심 기술의 하나이다. 특히 자세는 ROV 의 항법을 위해 필요한 정보일 뿐 아니라, ROV가 로봇 팔이나 기타 기구를 통하여 외부와 상호 작용을 하는 경우 제어하여야하는 중요 변수의 하나이다. 1 핵심 과제에서는 다양한 센서 측정 정보를 융합하여 위치와 자세를 추정하는 방법을 개발하고 있다.
본 뉴스 레터에서는 자세 추정 시 발생하는 여러 가지 문제점들 중 자기장 측정과 관련된 문제점과 이에 대한 가능한 해결 방법을 소개한다.

[그림 1] 자세 측정용 FOG IMU

수중 로봇의 자세는 보통 IMU를 사용하여 추정한다. IMU 보통 각속도와 가속도를 정보를 사용하여 자세를 추정한다. 가속도나 각속도의 시간에 따른 변화를 적분하여 roll, pitch, yaw를 추정한다. 따라서 시간이 흐르면 적분 오차가 누적되는 문제가 있다. 다양한 방법으로 이러한 오차를 제거하고 있는데, 그 중 하나로서 자기장을 사용하는 것이 가능하다. 그러나 자기장의 경우, hard iron 효과에 의하여 편차가 발생하고, soft iron 효과에 의하여 왜곡이 발생한다. 또한 센서의 방향 정렬 오차와 scale 오차에 의해서 측정값에 많은 오류를 포함하고 있어서 신뢰도가 매우 낮은 문제점이 있다. 따라서 자기장 측정 정보를 이용하기 위해서는 필연적으로 이러한 오차들을 제거하기 위한 방법이 요구된다.

[그림 2] 자기장 측정용 MEMS AHRS

자기장 측정시 발생하는 오차 중 hard iron 효과에 의해서 발생하는 오차는 센서 좌표계상의 출력 값에 일정한 편향을 발생시킨다. 이러한 편향은 센서를 모든 방향으로 회전하면서 출력 되는 vector 값을 모아서 추정 가능하다. 평향이 없는 센서인 경우, 각각의 측정 vector 들은 모아서 그램으로 표시하는 경우 원점을 중심 으로한 구가 된다. 그러나 편향이 발생하면 그 중심점이 원점으로부터 벗어나게 되므로 원점으로 벗어난 중심점을 찾으면 편차가 구해진다. 실제로 1 절에서 소개한 다른 오차 요소들이 있어서 측정 값들은 구를 형성하지 않는다. 따라서 hard-iron 편차를 구하기 위해서 최소 자승법에 의하여 측정 값들을 구타 타원에 근사기키는 방법을 사용한다. 전술한 방법은 센서를 모든 방향으로 회전하는 것이 가능한 경우에대한 편향 추정 방법이다. 만일 모든 방향으로의 회전이 어려운 경우에는 측정된 각속도를 활용하여 칼만 필터 방법을 사용하여 편차를 추정하는 것도 가능하다. 이외에 카메라에 의해 영상을 취득하여 편차를 추정하는 방법도 가능하다.
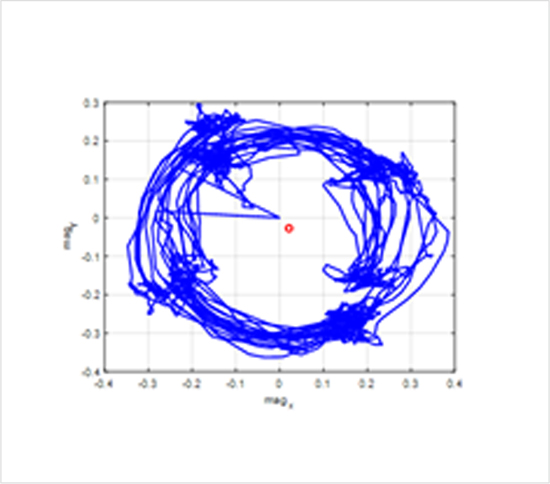
[그림 3] 측정된 자기장




