



1핵심과제에서 개발 중인 7자유도 수중 유압로봇팔의 개선작업이 진행 중이다. 과제 3차년도에 설계 및 제작되어 개발된 7자유도 수중 유압로봇팔은 육상 기준으로 팔을 최대한 뻗은 상태에서의 인양하중 (Full reach payload) 121kgf의 성능을 가지며, 수중 ROV 에 장착되어 다목적 임무를 수행할 수 있다.
4차년도 과제 수행을 통하여 유압로봇팔의 성능 및 안정성을 개선하는 작업이 진행 중이다. 로봇팔 외부로 돌출되었던 유압호스와 케이블들을 팔 내부로 지나갈 수 있도록 하여 유사시 호스 및 케이블의 파손을 방지하였다. 또한 케이블의 내구도 향상을 위해 우레탄 호스의 재질과 크기를 변경하였다. 로봇팔 제어에 필요한 하위제어기 (HAC : Hydraulic Actuator Controller) 와 기구학 연산 제어기 (LCU : Limb Control unit), 서보밸브를 모두 로봇팔 내부에 장착함으로서 센서 노이즈를 감소시키고 로봇팔 전체의 강성을 향상시켰다.
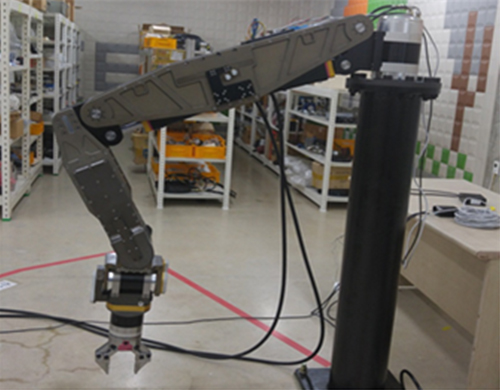
[그림 1-1] 7자유도 수중 유압 로봇팔
동시에 별개의 유압 액추에이터 성능 시험 장비를 이용하여, 액추에이터의 내구도 및 성능 검증을 수행하고 있다. 이와 같은 작업들을 통해, 기존에 미흡했던 부분을 개선하며 매니퓰레이터로서의 완성도를 높이고 있다. 또한 설계 수치상으로만 확인하였던 인양하중 (Full reach paylaod) 120 kgf을 실제 실험을 통해 성능을 증명하였으며, 전장 컴포넌트들의 내압 성능 테스트를 수행하여 실제 가압 상황에서 매니퓰레이터가 버틸 수 있을지 검증 작업을 진행하고 있다.

5자유도 수중 유압 로봇팔은 앞서 개발이 진행되고 있는 7자유도 로봇팔과 함께 작업을 수행하며, 작업의 보조 및 작업 대상을 지지 및 고정하는 역할을 맡는다. 1핵심과제의 5자유도 수중유압로봇팔은 7자유도 수중유압로봇팔과 함께 개발되고 있으며, 목표 성능은 육상 기준으로 팔을 최대한 뻗은 상태에서의 인양하중 (Full reach lifting force) 181kgf 이다. 구조는 7자유도 로봇팔에 비해 단순한 편이며, 정밀한 작업보다는 내구도와 높은지지 하중에 초점을 맞추어 개발되고 있다. 현재 로봇팔의 상세 설계가 완료되어 제작이 진행되고 있다.
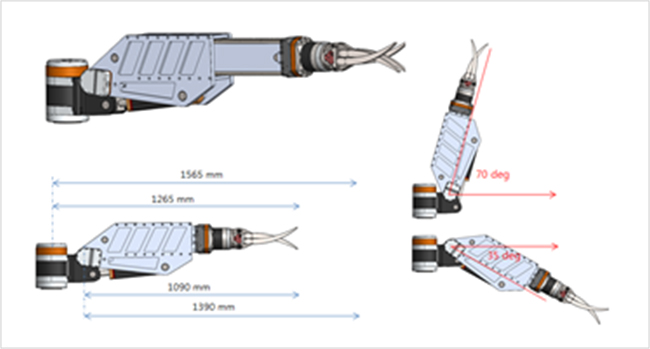
[그림 1-2] 5자유도 수중 유압 로봇팔




