IJPEM
A robust time-delay nonlinear controller for a pneumatic artificial muscle
소프트 로봇을 위한
인공공압근육의 제어기 개발
안경관/울산대학교
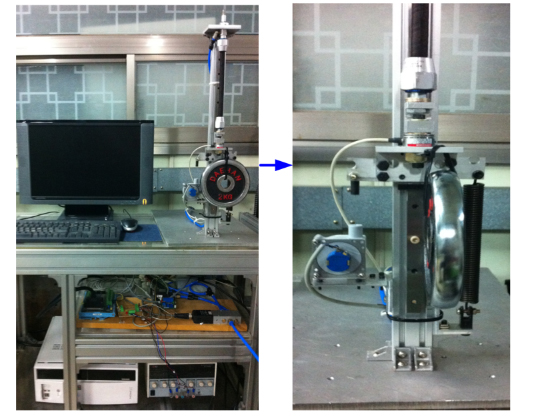
- · 본 연구는 강한 비선형성을 가지는 인공공압근육의 위치제어에 적용하기 위한 강건 비선형제어기의 설계 및 제어 실험을 목적으로 함
- · 제안하는 제어기는 제어시스템의 비용 및 계산 부하를 최대한 줄이기 위하여 시간지연 추정기를 제안하고 있음
- · 나아가 추정오차를 최소화하고 제어성능을 극대화하기 위하여 슬라이딩 모드 기반 강선 선형 및 비선형 보상기를 제안함
- · 제안된 제어기를 다양한 부하 조건의 1축 인공공압근육에 적용하여 제안한 제어기의 유효성과 소프트 로봇에의 적용가능성을 확인함