

12월 호에서 소개하였듯이 해외에서는 이미 착저식 해저지반조사장비가 다양하게 개발되어 활용되고 있는 반면, 국내에서는 전무한 실정이라 대수심 지반조사를 위한 목적으로 막대한 비용을 들여 외국 장비를 임대하여 쓰고 있다. 따라서 증가 추세의 해양 구조물 수요와 수심이나 조류 등 열악한 해양환경을 고려하여 이에 적합한 독자적인 해저 지반조사기법 개발이 필수적이었다.
2000년대 초반부터 KIOST에서는 국토해양부의 연구개발 과제의 일환으로 해양 연약지반의 물성을 신뢰성 있고 경제적으로 측정할 수 있는 착저식 해양 콘관입시험기(CPT)를 국내 독자적인 기술로 개발하였다(장인성 등, 2007). 시료채취 없이 지반조사가 가능한 시스템으로 국내 해양의 지형 및 지질 조건과 가용 선박조건 등을 고려하여 시험기의 제원을 결정하였다. 먼저, 대상지반 및 수심의 경우, 최대 시험 수심은 60m이고(적정 활용 수심 : 10m~40m), 최대 시험지반 두께는 GL-60m 정도, 비교적 단단한 모래층 지반 정도까지 적용하는 것으로 계획하였다. 콘의 관입에 의한 반력을 자중으로 활용하고자 하는 목적으로 총중량은 11ton(수중 중량 기준) 정도로 하였고, [그림 1]에 나타나 있는 바와 같이 부가되어 있는 앵커식 기초(석션 기초1)의 용량까지 고려한다면 약 20ton 이상의 반력을 확보할 수 있도록 하였다.
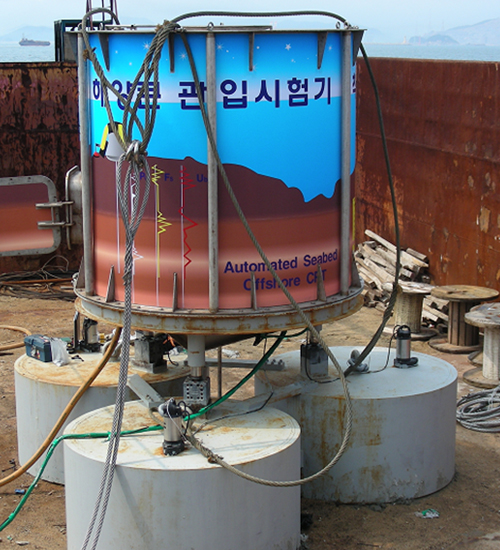
[그림 1]. 착저식 해양 콘관입시험기

[그림2] . 착저식 해양 콘관입시험기
수중에서 무인 착저식 전자동의 개념으로 작동되기 때문에 육상에서 사용하는 콘관입시험기와는 다른 제작 기술을 요구하고 있다. 이 시험기의 핵심 기술로는 신축이 자유로우면서 강성을 확보하는 관입용 로드2 시스템, 휠드라이브 시스템3 을 이용한 자동관입기술, 콘의 연속 관입을 위한 관절형 로드 연결 및 제거 기술, 무인 작업을 위한 자동센서기술, 대수심에서의 작업을 위한 수밀기술 등 다양하다. 또한, 원통형의 기초를 3함 설치하고 석션 기초 기술을 이용하여 지반에 완전히 밀착시킴과 동시에 지반에 안정적으로 위치할 수 있도록 제작되었다. 콘이나 측정장치 등은 기존에 육상에서 활용되고 있는 장치를 그대로 활용하였다.
[그림 2]착저식 해양콘관입시험기의 다른 예를 보여주고 있다. 이는 휠드라이브와 석션 기초를 활용한다는 측면에서는 [그림 1]의 장비와 유사하지만, 콘 로드를 장비에 연속적으로 연결한 상태에서 관입 및 인발을 한다는 측면에서는 다른 방식이다. 이 장비의 경우에는 약 15m 심도의 물성을 신속하게 파악할 수 있는 장점을 가지고 있다.
KIOST에서 개발한 또 다른 착저식 지반조사로봇은 DrillBot-1004 이다[그림 3]. 이는 국토교통부의 초장대교량사업단 사업의 일환으로 진행된 것으로, 해저면에 착저하여 유선에 의한 원격 조정이 가능한 무인 자동화 지반조사 장비이다. 100m의 수압 조건에서 심도 50m까지 지반 굴착이 가능한 보링 장비 기술을 개발하였다(김우태 등, 2011). 앞선 해양콘관입시험기가 토사 지반에 대해 적용이 가능한 반면, 이 로봇은 모든 지반에 적용 가능하다.
수심 100m에서 시추 및 시료채취를 위하여 전기, 전자, 제어, 기계공학을 접목한 로봇 제작 기술과 100m 수압 조건에서 전원, 유압, 신호, 제어 케이블 연결 기술을 개발하였다. 또한 해저 지반의 심도 50m까지 굴착할 수 있도록 기존의 rotary drilling 방식5 을 활용하여 설계 및 제작하였다. 그에 필요한 자동 착탈식 로드 50m 이상 제작, 자동 착탈식 토사 지반 공벽 보호용 케이싱6 장치, 로드 및 케이싱 자동 연결 및 분리 시스템, 로드 및 케이싱 자동 공급 및 수납 시스템, 무인 원격 조정이 가능한 로봇 제어 시스템 기술, 다양한 표층 지반에 사용 가능한 착저식 frame 장치 기술을 포함하고 있다.
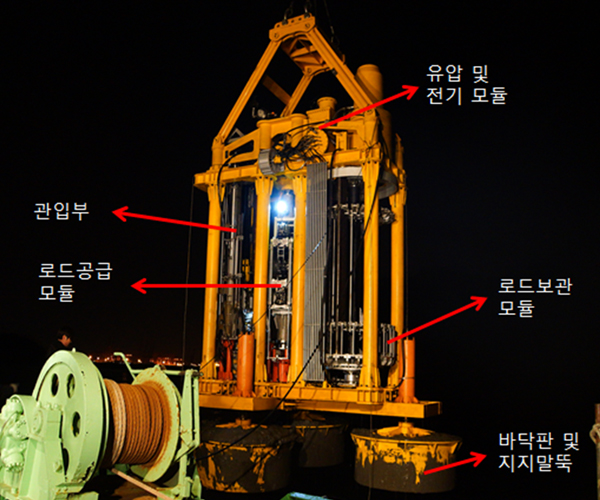
[그림 3]. DrillBot-100(KIOST, 2014)
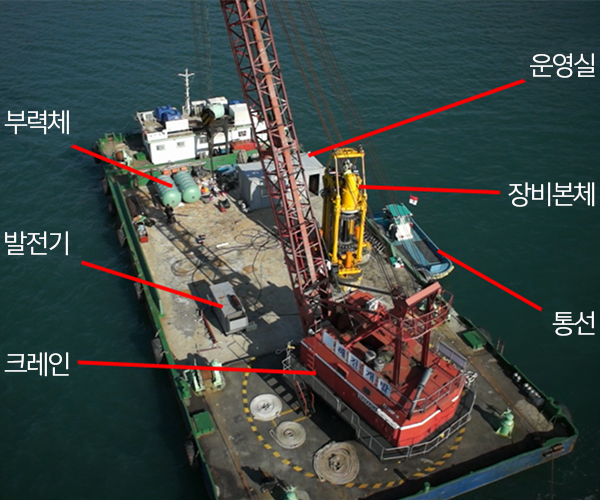
[그림 4]. DrillBot-100 운영 장면(부체식 바지선 활용)
토사 및 암반에 대한 시료채취 이외에도 대표적인 지반조사기법 중 하나인 표준관입시험(Standard Penetration Test, SPT7) 장치가 포함되었다는 점은 해저 착저식 로봇 중 전세계적으로 유일한 특징이다. 수밀조건 및 자동화 기술 등을 활용하여 육상시험과 동일한 조건을 고려하여 결과의 신뢰성을 확보하고자 하였다. 현재 로봇 개발 완료 이후 [그림 4]와 같이 수차례 성능실험을 완료한 상태이며, 향후 실제 현장에 투입할 계획이다.
앞서 설명한 바와 같이 석유나 가스와 같은 해양자원의 대수심 조건으로 이동함에 따라 전 세계적으로 대수심 조건에 대한 해저면 착저식 시추로봇을 경쟁적으로 개발하고 있다. 해저열수광상이나 망간단괴 등과 같은 해저광물자원의 개발, 해저케이블이나 파이프라인, 해양플랜트 구조물 등 다양한 종류의 해양구조물 설치 등의 목적도 이에 해당된다. 즉, 해양자원 및 해양공간 개발을 위해서는 반드시 필요한 해저 시추작업 및 지반조사, 시료채취 등을 효율적・효과적으로 방안을 꾸준히 연구하고 있으며 이에 따라 착저식 시추로봇에 대한 독자적인 기술개발을 진행 중인 것이다. 실제 대부분 상용화하여 실제 현장에 투입되고 있지만, 대부분 제작 판매보다는 용역이나 임대 등의 형태로 활용되고 있다. 착저식 시추로봇 자체의 판매 가격에 비해 운용 및 용역 비용이 상대적으로 크기 때문이다.
해저면 착저식 시추로봇을 포함한 수중건설로봇의 개발 및 활용 의지는 비단 미국과 유럽에 국한된 것이 아니다. 중국과 일본은 해저 시료 채취를 위한 시추선을 자국의 기술력을 확보하여 자체 건조하여 자국의 해외자원개발과 탐사 및 각종 해상토목 공사에 활발히 활용하고 있으며, 세계 시장에서 활용도가 증가하고 있다. 특히, 중국은 최근 세계 최고 수준의 해저 ROV 제작사인 영국의 SMD사8 를 인수하여 세계시장에서 경쟁력을 확보하고 그 영향력을 크게 확대하고 있지만 국내 기술에 대한 투자는 아직까지 미흡한 상태이다.
현재 KIOST에서 진행되거나 계획하고 있는 연구사업 중 여러 부분이 착저식 시추로봇과 연계되어 있다. 우선, 해저면 착저식 시추로봇의 세부기술 개발과 관련한 것이다. 천해용(100m 이내) 조건에 대한 해저시추로봇 기술은 이미 확보한 바 있기 때문에 이를 바탕으로 대수심 조건(2,000m 이상)에 대한 기술 개발이 진행될 필요가 있다. 여기에 해당되는 핵심 기술로는 크게 세부 모듈(샘플러, 코어러, 로드 수납시스템, 샘플러 수납시스템, 로드/배럴 운영 로봇암)을 포함한 착저식 시추로봇 플랫폼 기술과 대수심 조건에 대한 운영시스템 기술로 구분할 수 있다. 현재 진행되고 있는 수중건설로봇사업단의 기획 단계에서 착저식 시추로봇에 대한 내용이 포함되었다(해양수산부, 2012)으며, 2012년 당시 예비타당성조사를 담당한 KISTEP에서는 기존의 천해용 해저지반조사로봇(DrillBot-100)의 개발이 완료된 이후 진행하는 것으로 제언한 바 있다. 이미 DrillBot-100의 개발이 성공적으로 마무리된 시점에서 대수심용 해저면 착저식 시추로봇에 대한 연구를 추진할 계획이다. KIOST에서는 해양수산부의 기획사업으로 ‘해저지질시료 획득을 위한 시추시스템 구축 기획연구’를 수행한 바 있으며, 대수심용 착저식 시추로봇에 대한 내용이 포함되어 있다. 국내 기술을 바탕으로 대수심용 착저식 시추로봇이 개발된다면 KIOST에서 진행 중인 해저지질조사 연구개발 사업을 비롯하여 심해저 해저열수광상 광구 확보 등 해저 광물자원 개발을 위한 연구개발 사업 등과 연계할 수 있을 것이다.
해상풍력을 포함한 해양에너지 시설 및 해양플랜트 시설 등 대수심 수요가 증대됨에 따라 해외에서는 독자적인 기술을 활용하여 이미 다양한 종류의 해저면 착저식 시추로봇을 개발하여 실제 현장에 투입하고 있다. 하지만, 현재 국내 착저식 시추로봇은 KIOST에서 국가연구개발사업을 통해 개발한 비교적 천해 조건(수심 100m 이내)을 대상으로 한 착저식 해양콘관입시험기와 DrillBot-100이 전부인 실정이다. 물론 실제 현장 적용에 주목적을 두고 수중에서의 원격제어기술이나 수중로봇 설계/제작기술 등을 독자적으로 개발한 것이므로 향후 천해 조건을 대상으로 사업화 및 실용화에 상당히 유리한 입지를 확보할 수 있지만 대수심 조건(수심 2,000m 이상)에 적합한 해저 시추 시스템의 개발 또한 필요하다
해양자원개발과 해양플랜트 시장이 급증하고 있는 현 시점에서 해외 기술이나 장비 도입에 따른 외화 유출 등을 감안한다면 독자적인 기술의 착저식 시추로봇 개발은 필수적이며, 실제 현장에 활용할 수 있는 전용 선박 또한 필요하다. 향후 착저식 시추로봇을 비롯하여 시추선9 구축이 최대한 빠른 시일 내에 진행되길 희망한다.
- 원통 형태의 기초에 석션압(suction pressure)을 가하여 내부와 외부의 수압 차에 의해 관입되는 방식.
- 지반 시추장치나 시료채취장치와 연결하여 지중으로 관입되는 연결용 로드(rod)이며 steel pipe 형태로 되어 있음.
- 관입용 로드를 휠드라이브(Wheel drive)의 마찰을 이용하여 지중으로 관입시키는 방식.
- KIOST와 참여기업인 두배시스템이 개발한 착저식 시추로봇의 이름이며, 100m 수심까지 실험을 수행할 수 있음.
- 물 순환 장치, 로드 회전 장치, 로드 관입 장치 등 포함하여 시추 작업을 수행하는 방식
- 토사 지반에서 시추작업 동안 시추공벽이 무너지는 방지하기 위해 설치하는 steel pipe
- 63kg의 추를 76cm 높이에서 자유낙하하여 샘플러가 30cm 관입될 때의 타격회수(N값)를 측정하는 시험법이며, N값을 이용하여 설계정수를 도출할 수 있음.
- Soil Machine Dynamics Ltd
- 수중로봇의 실해역 적용을 위한 전용선박으로 활용 가능




