IJPEM
Calibration Algorithm of a Spring Static Balancer
동적 움직임을 이용한 다자유도 스프링 중력 보상기 보정 알고리즘 개발
최문택/성균관대학교
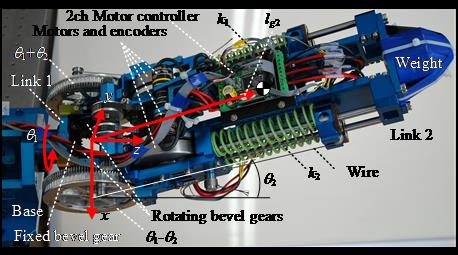
[그림 설명] 베벨 중력 보상기가 장착된 2자유도 roll-pitch 매니퓰레이터. 두 개의 스프링이 상호작용 하여 중력 보상을 수행하는 기구로 개발된 알고리즘을 적용하여 정밀한 중력보상을 수행 하였음
- 조창현 교수(조선대)와 최문택 교수(성균관대) 연구팀이 다자유도 스프링 중력보상기 보정 알고리즘을 개발하였다.
- 스프링 중력 보상기 제작시 다양한 불확정성(예, 스프링 상수)으로 인해 정밀한 중력 보상이 어렵다. 특히, 스프링의 상호작용으로 중력보상을 수행하는 다자유도 공간 운동 중력 보상기의스프링 부착 위치를 보정하는 것은 매우 어렵다.
- 연구팀은 다자유도 중력 보상기의 정밀한 중력보상을 위해 조창현 교수가 개발한 중력보상 설계 방정식에 동적 상황에서 추정된 불평형 토크를 적용하여 스프링 위치 보정 값을 계산하는 알고리즘을 개발하였다. 불평형 토크 추정은 조인트 토크 센서를 활용한 알고리즘과 센서리스 알고리즘을 제안 하였다.
- 조창현 교수는 “정적 상황에서만 가능했던 스프링 위치 보정값 계산을 동적 상황에서 수행할 수 있게 되어 보정 시간을 획기적으로 줄이면서 충분한 데이터를 확보하여 중력보상 정밀도를 향상시킬 수 있음을 보였다”라고 연구의 의의를 설명했다