Development of Efficiency Enhanced Scotch Yoke Mechanism for Robotic Fish
로봇물고기에 적용 가능한 효율적인 Scotch-yoke 메커니즘 개발
박용재, 조규진/강원대학교, 서울대학교
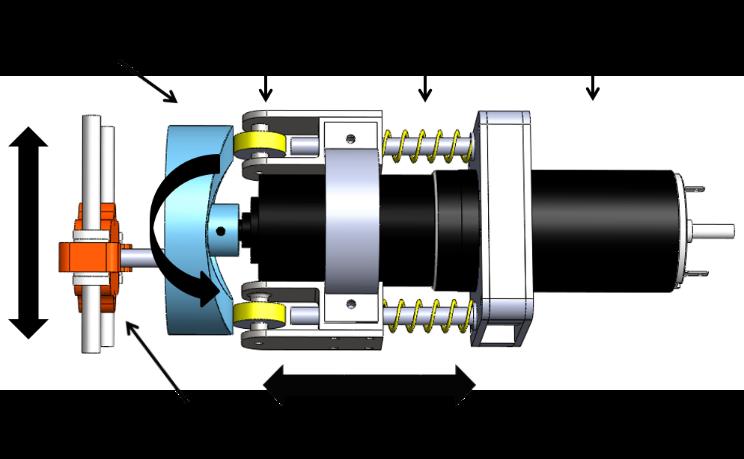
[그림 설명] 효율이 강화된 스커치요크 메커니즘
조규진 교수(서울대)와 박용재 교수(강원대) 연구팀이 스카치 요크 메커니즘의 특성을 이용하여 스프링이 적용되어 효율이 향상된 메커니즘을 개발하였다.
연구팀이 개발한 새로운 메커니즘은 상대적으로 에너지가 적게 사용되는 영역에서 스프링에 에너지를 저장하였다가 높은 에너지가 필요한 영역에서 방출할 수 있는 장점이 있다. 이를 통해 동일 에너지를 사용하여 로봇물고기의 추력을 개선시킬 수 있으며, 향후 이를 적용하여 고속의 로봇물고기 제작이 가능할 것으로 판단하고 있다. 특히 이번 연구에서는 효율적인 디자인과 캠 메커니즘을 적용하여 컴팩트한 스커치요크 메커니즘을 개발하였다.
권석령 연구원은 “로봇물고기가 수중에서 더 빠르고 긴 운영시간을 갖기 위해서는 높은 추력과 이를 위한 효율적인 메커니즘의 개발이 필수적이다.”며 “특히 추가적인 무게 증가와 로봇물고기의 크기를 증가시키지 않고 사용할 수 있는 효율적인 메커니즘의 개발”이라고 연구의 의의를 설명했다.