한국정밀공학회지
Review of the Insect-Inspired Robots: from Single to Multi-Modal Locomotion
곤충형 지상생체모방로봇의 분류와 개발 현황
조규진/서울대학교
-
생물의 이동방식은 오랜 기간 환경에 적응하며 진화해왔고 극한 환경에서의 이동을 위한 로봇 개발에 생체의 핵심 원리를 적용하고있다.
-
지상 생체는 크롤링을 통해 높은 에너지 효율로 지상을 이동한다. 이러한 생체를 모방한 크롤링 로봇은 다리의 형상과 다리 관절의 존재 여부에 따라 다리형 로봇(Legged robot)과 다리-바퀴형 로봇(Leg-wheel robot) 그리고 무족형 로봇(Limbless robot)으로 분류될 수 있다.
-
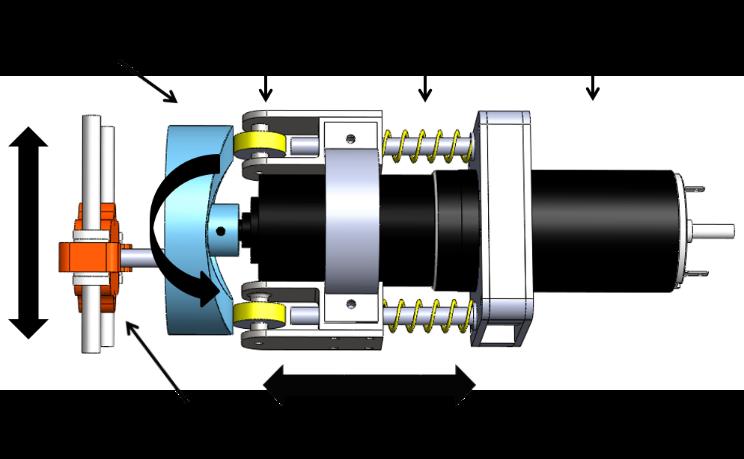
곤충은 점핑을 통해 위험에서 빠르게 벗어나거나 상대적으로 큰 장애물을 넘을 수 있다. 이를 모사한 로봇에는 에너지 저장메커니즘과 이를 빠르게 방출 시킬 수 있는 트리거 메커니즘이 필요한데, 에너지 저장은 탄성체를 주로 사용하고 트리거 메커니즘은 이스케이프먼트 캠(Escapement cam), 일부 이가 없는 기어(Toothless gear), 편도베어링(One way bearing) 그리고 토크역전 메커니즘(Torque reversal catapult mechanism) 등이 사용된다.
-
곤충은 다양한 이동방식을 활용해 다양한 장애물을 극복하고 생존한다. 이처럼 로봇이 실제 임무에 투입돼 활용되기 위해서는 하나 이상의 이동방식을 수행할 수 있어야 하며 주어진 환경에 따라 적합한 이동방식을 수행할 수 있어야 한다. 이를 위해 서로 다른 이동방식을 융합한 복합거동 로봇 개발이 진행되고 있다.