IJPEM
Silver-Nanowires Coated Pitch-Tuned Coiled Polymer Actuator for Large Contractile Strain under Light-Loading
소형 소프트 로봇 제어용 인공근육섬유 개발
윤성률/한국전자통신연구원
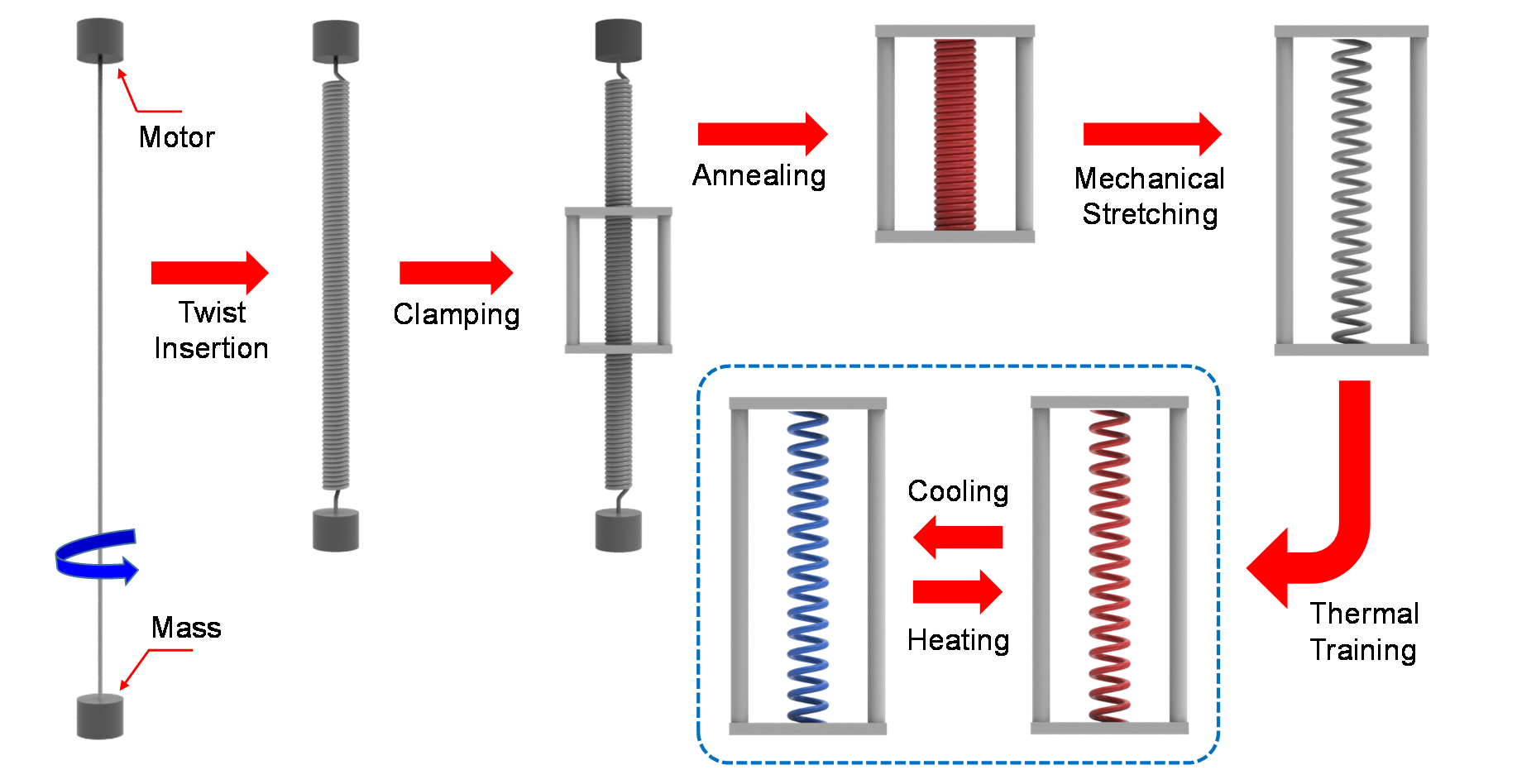
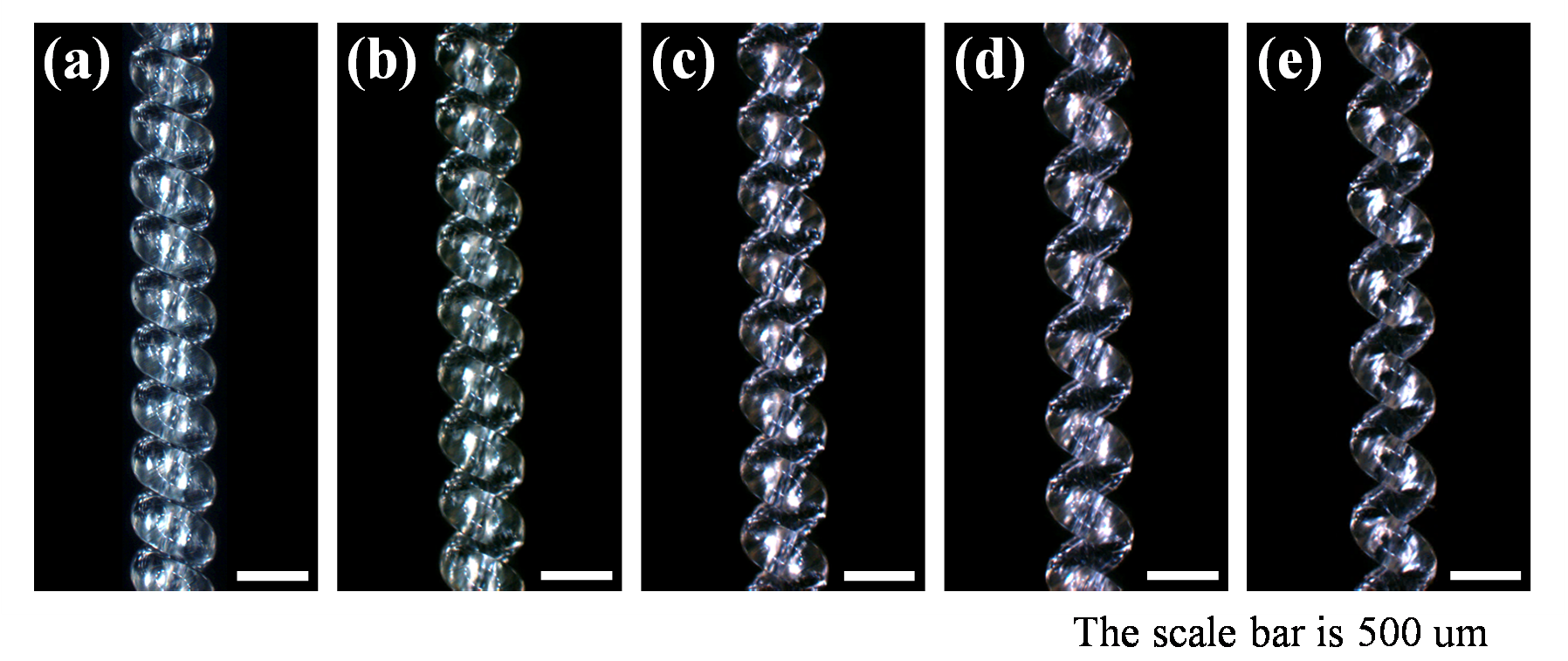
[그림설명] 피치 제어형 코일 구조 액추에이터 제작 과정과 서로 다른 피치의 인공근육섬유: (a) 0%, (b) 10%, (c) 30%, (d) 50%, (e) 70%
- 한국전자통신연구원 스마트UI/UX디바이스 연구팀이 소형 소프트 로봇의 인공근육섬유로 활용 가능한 피치 제어형 코일 구조 액추에이터를 개발하였다.
- 나일론 소재 섬유 기반의 트위스트 삽입형 코일 구조 액추에이터는 특정 열처리 과정을 통해 수축, 이완이 가능한 열-구동 인공근육으로 활용할 수 있는데, 연구팀은 수축 공간을 확보하기 위한 열처리 과정에서 코일의 피치를 조절함에 따라 최대 수축률을 증가시킬 수 있음을 밝혀냈다.
- 열 응답 반복 구동 안정성을 확보하기 위한 은나노와이어 유연 전극의 형성 방법을 제안하고, 작은 부하에서도 대변형 수축을 달성함을 보여 코일 구조 인공근육섬유의 설계 자유도를 높일 수 있는 가능성을 제시하였다.
- 제안하는 액추에이터는 인공근육섬유 강도 제어 장치로 최적화되어 소형 소프트 로봇의 구동부 및 소프트 근력 증강 시스템에 사용될 전망이다.